
Topology-based Group Routing in Partially Known Environments
This work was done in collaboration with Dr. Jory Denny from the University of Richmond and was accepted to the 35th ACM/SIGAPP Symposium on Applied Computing. Although we will not be able to go present this work in person, I am excited that we will be able to do so virtually.
Jory Denny and Benjamin T. Fine, “Topology-based Group Routing in Partially Known Environments,” 35th ACM/SIGAPP Symposium on Applied Computing (SAC) 2020, Brno, Czech Republic, to appear, March 30 – April 2, 2020, Brno, Czech Republic.
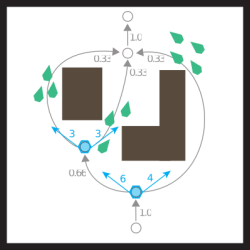
We explored the application of a Reeb Graph-based workspace skeleton to direct a group of agents through an environment. We proposed a learning algorithm that adaptively maximized the throughput of a group of agents moving through a static environment with unknown properties affecting group motion. By augmenting an embedded workspace skeleton with edge labeling, we were able to achieve quick convergence to a near-optimal agent distribution, as demonstrated in the figure. In this work, we found evidence that a workspace skeleton can be highly effective in manipulating a group of agents operating under motion uncertainty.